- تله سرمایه گذار: از خفه کردن و سوزاندن مراقب باشید
- 7 راه برای استفاده از هوش مصنوعی اکنون برای تأثیرگذاری بر مدیریت ریسک و جلوگیری از غرق شدن در داده ها
- مبادلات ، سوپر های الکترونیکی و بازپرداخت
- الگوریتم های معاملاتی هوشمند
- گزینه های سرمایه گذاری
- ثروتمندترین معامله گران فارکس
- 4 دلیل شما باید Dogecoin را بفروشید و چرا ممکن است آن را حفظ کنید
- سرمایه گذاری در مایع هوایی
- بحران ارز
- سهام جویدنی به عنوان درآمد نشان می دهد که تعداد مشتری را کاهش می دهد ، پیش بینی رشد سود

آخرین مطالب
امکانات وب


با وجود این واقعیت که یک روش دقیق برای اندازه گیری موقعیت سر و موقعیت چشم می تواند به تشخیص سیستم وستیبولار کمک کند ، این موضوع به طور سیستماتیک مورد مطالعه قرار نگرفته است (هوزمن و همکاران ، 2008).
حرکات افقی و عمودی چشم را می توان با تصویری از چشم (مور و همکاران ، 2006) با تشخیص لبه های دانش آموز (عنبیه) و قرار دادن آنها در بیضی اندازه گیری کرد (لی ، 2006). هدف اصلی تجزیه و تحلیل حرکات چشم ، به دست آوردن مرکز دانش آموز یا عنبیه است. اندازه گیری پیچشی به توضیحات عنبیه با کیفیت بالا نیاز دارد. سیستم ویدیویی PAL (NTSC) فیلم را با فرکانس 50 هرتز (60 هرتز) غیر مداخله ضبط می کند. این سیستم های ویدیویی برای ضبط تصاویر از حرکات چشم بسیار کند هستند ، به عنوان مثالتوضیحات عنبیه پیچشی. در عمل پزشکی حرکات مستند چشم با فرکانس تقریباً 200-250 هرتز بود. این حرکات تغییر زاویه ای تقریباً 400 - 450 درجه در ثانیه دارند.
ما از روش تشخیص استفاده کردیم که نقاط رابط بین دانش آموز و عنبیه یا بین عنبیه و اسکلرا را جستجو می کند. نقاط پایه عملکرد ریاضی (به عنوان مثال دایره یا بیضی) هستند. هدف از راه حل ما استفاده از تشخیص حرکات چشم در مقایسه با صحنه تحریک است. این صحنه را می توان در صفحه LCD یا از طریق واحد ویژه نمایش HMD در فضای 2D یا 3D نشان داد.
ما از یک سیستم جدید بر اساس پیدا کردن دانش آموز طرح کلی چشم استفاده کردیم. ما از الگوریتم Starburst اصلاح شده (Duchowski و همکاران ، 2009) استفاده کردیم (Ruian et al ، 2006) ، که ما در طیف IR یا در طیف قابل مشاهده استفاده کردیم. سیستم و الگوریتم برای اولین بار توسط دانشگاه آیووا در سال 2006 منتشر شد (لی ، 2006). با تشکر از نمایشگرهای ویژه طرح ریزی HMD 3D ما از الگوریتم Starburst برای اندازه گیری در طیف IR و دیود LED مناسب برای روشن کردن چشم استفاده کردیم. این روش فعال نامیده می شود ، زیرا چشم در طیف قرمز مادون قرمز اسکن می شود. هدف از اندازه گیری حرکات چشم محل مرکز منطقه دانش آموز بود. روش یافتن حاشیه های دانش آموز (طیف IR) یا عنبیه (طیف قابل مشاهده) با توجه به مقدار اشعه محدود است. نقطه شروع اشعه ها را برای تولید امتیازات دانش آموز کاندیداتیک شلیک می کند. امتیازات شاگرد نامزد ، اشعه را به سمت نقطه شروع شلیک می کند تا امتیازات بیشتر دانش آموز کاندیداها را تشخیص دهد. این روش تشخیص دو مرحله ای از مشخصات بیضوی کانتور شاگرد استفاده می کند تا ترجیحاً ویژگی های موجود در کانتور مردمک را تشخیص دهد.
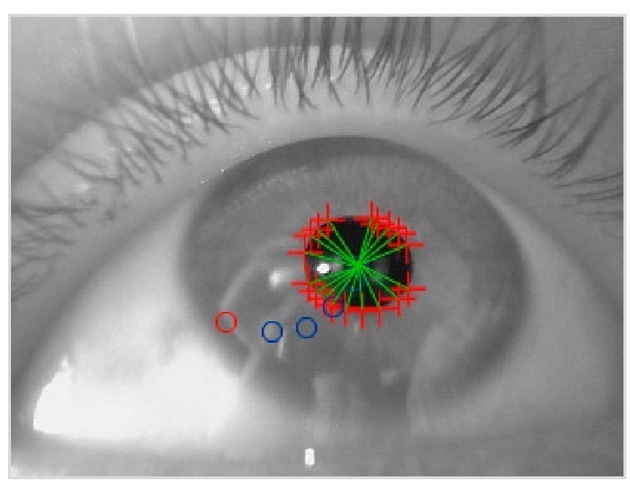
شکل 6. محل مرکز دانش آموزان با اشعه.
دایره (شکل 6 را ببینید) مرکز دانش آموز را پس از تکرار دوم (و بعد از تکرار بعدی) نشان می دهد و شامل نقاط تعیین شده است. تکرار برای یافتن مرکز دانش آموز هنگامی متوقف شد که مرکز شناسایی شده نقاط جدید کمتر از D = 10 پیکسل شد. با تشکر از محاسبه نمایی ، خطای مرکز دانش آموز حدود 10 پیکسل از کل یاتاقان های دایره ای است و از نظر بیضوی در نتیجه نقاط یافت شده مهم است. در پایان ، می توانیم مرکز دانش آموز را از بیضی حاصل پیدا کنیم.
روشهای ممکن تر وجود دارد که چگونه می توانیم بیضی حاصل را جمع کنیم. ما روش (Ruian et al ، 2006) اجماع نمونه تصادفی (RANSAC) را برای حل مشکل با نقاط خطای بزرگ انتخاب کردیم (لی و پارک ، 2009). روش RANSAC یک روش کارآمد برای تکمیل مدل در حضور رئوس مطالب بزرگ اما ناشناخته در اندازه گیری نمونه است. در مورد ما ، تمام نقاط یافت شده داخلی نقاط احتمالی است که با طرح کلی دانش آموز مطابقت دارد. از الگوریتم RANSAC برای برآورد پارامترهای مدل ریاضی از مجموعه ای از داده های مشاهده شده که حاوی خارج از کشور است ، استفاده شد. بر اساس مستندات MATLAB ما از مدل ریاضی بهینه برای ایجاد الگوریتم بیض ی-nelde r-mead استفاده کردیم.
برای تحریک چشم ما از سیستم تجاری HMD Emagin Z800 3Dvisor با ردیاب سر یکپارچه استفاده کردیم که می تواند موقعیت سر را در فضای سه بعدی اندازه گیری کند. Z800 3DVISOR سیستم نمایش شخصی برای ترکیب دو نمایشگرهای میکرو OLED (دیود با انتشار آلی) با قابلیت های 3D Stereovision است. بینایی استریو به توانایی انسان در دیدن در سه بعد اشاره دارد و بیشتر اوقات به ادراک عمق (توانایی تعیین فاصله تقریبی اشیاء) اشاره دارد. Stereovision 3D با ارائه دو تصویر مجزا به طور همزمان در دو صفحه جداگانه ، یکی برای هر چشم ، این تجربه را فراهم می کند. از صفحه نمایش شخصی Z800 3dvisor برای تحریک چشم در فضای 2D یا 3D استفاده می شود. موقعیت چشم و موقعیت سر را می توان همزمان توسط دوربین فیلمبرداری و ردیاب سر یکپارچه در لپ تاپ ضبط کرد.
نمایشگر HMD HMD Emagin Z800 3Dvisor را از MEMS (سیستم میکرو الکترومکانیکی) شتاب سنج و ژیروسکوپ ها برای تشخیص حرکت استفاده می کند. ردیاب سر دارای سه ژیروسکوپ است که هر کدام برای محور X- ، Y- و Z است. علاوه بر این ، ردیاب سر شامل قطب نما و شتاب سنج مربوطه برای اطمینان از عملکرد بر روی اشکال مختلف حرکت است. چنین تجهیزات قبلاً در عمل پزشکی مورد استفاده قرار نگرفته است. از دیدگاه فناوری معاصر امکان استفاده از سنسورهای اندازه گیری 3D اندازه گیری سه بعدی مینیاتوری دقیق تر/سنسورهای حرکت (IMU) با شتاب سنج ، مگنتومتر و ژیروسکوپ (به عنوان مثال فناوری های حرکت XSENS) و صفحه نمایش سفارشی ساخته شده از سر (HMD) وجود دارد. ما برای اندازه گیری موقعیت سر از ردیاب سر استفاده کردیم.
برای دستیابی به حرکت سر ، ما نرم افزار ویژه ای را بر اساس Z800 3Dvisor SDK 2. 2 برنامه ریزی کردیم. این نرم افزار از طریق اتصال USB موقعیت سر را از ردیاب Build-in Head بازیابی می کند و نتایج اندازه گیری شده را در پرونده CSV (مقادیر جدا شده از کاما) ذخیره می کند. نتیجه اندازه گیری را می توان به صورت گرافیکی به عنوان نمودار موقعیت سر ارائه داد. با این مجموعه ما قادر به اندازه گیری حرکات چشم و سر به طور مداوم و همزمان هستیم.
در طول اندازه گیری قطعات مشکل ساز قبل از آزمایش های زیست پزشکی بعدی حل می شدند. مشکلات مربوط به وزن ، لبه های تیز در آینه های نیمه نفوذ پذیر و مکان حداقل بین نمایش شخصی Z800 3dvisor و چشم ها بود.
در نوع پایه قبلی ما نمایشگرهای جدید پیش بینی را ساختیم ، که امکان ردیابی را بر روی مانیتور LCD یا صفحه نمایش طرح ریزی در طیف قابل مشاهده فراهم می کند. الگوریتم تشخیص می تواند موقعیت چشم و موقعیت صحنه را اندازه گیری کند. پرونده های ویدیویی موقعیت ها در پرونده تاریخ ادغام می شوند. نسخه دوم نمایشگرهای طرح ریزی دارای وزن کمتری است ، حاوی لبه های تیز نیست و شامل دوربین هایی است که به کمک رابط USB (اتوبوس سریال جهانی) متصل می شوند و از هیچ ضبط کننده خاصی استفاده نمی کنند. منبع تغذیه از طریق درگاه USB حل می شود. ما از نرم افزار ضبط TVIDEOGRABBER استفاده کردیم. TVIDEOGRABBER نرم افزاری می تواند پارامترهای ضبط را تنظیم کند (30 فریم در ثانیه - فریم در ثانیه ، 640 x 480 پیکسل ، RGB24 ، فرمت داده AVI). ما از یک فلاش خارجی از دستگاه عکاسی برای هماهنگ سازی بین دو دوربین استفاده کردیم (در آینده ما از مؤلفه Tvideograbber با موضوعات بیشتر استفاده خواهیم کرد. موضوعات به طور همزمان ضبط از چندین منبع ویدیویی را شروع می کنند).
نوع بعدی نمایشگرهای پیش بینی ما برای اندازه گیری در طیف IR تعیین شده است. نمایشگرهای سومین نمایشگر از دوربین های USB IR استفاده می کنند که حرکات چشم را ضبط می کنند. نوع این نمایشگرهای طرح ریزی باید از دوربین هایی استفاده کنند که از اسکن حرکات چشم در طیف IR پشتیبانی می کنند زیرا نورپردازی در حال حاضر ضعیف است. این نوع نمایشگر نمایشگر یک سیستم منحصر به فرد برای اندازه گیری حرکات چشم و موقعیت سر با تحریک 2D یا 3D را ترکیب می کند.
شیشه های تخصصی - نمایشگرهای پیش بینی برای معاینه عصبی می توانند بدون مانیتور LCD به لطف ساخت و سازهای پیش بینی HMD 3D نمایش داده شوند. این نمایشگرهای پیش بینی می تواند به عنوان یک سیستم تلفن همراه نیز مورد استفاده قرار گیرد. ما از سیستم های آزمایشی برای نظارت بر حرکات چشم با شرایط درخشان مختلف (در طیف مرئی یا در طیف IR) یا با استفاده از منابع تحریک مختلف (به عنوان مثال ضبط حرکات چشم در فعالیتهای خاص استفاده می کنیم.- "چشم هولتر" ، ضبط حرکات چشم طولانی ، تحریک 2D و 3D و همکاران).
تفسیر و ارزیابی موقعیت چشم ، سر و شانه
برای تجزیه و تحلیل موقعیت ها ما از روشهای ساده بر اساس ترکیب روشهای اساسی ارزیابی قطعات بدن استفاده می کنیم. در زیر روشهای تفسیر دقیق داده های اندازه گیری شده را شرح می دهیم. با توجه به اینکه سیستم ها داده های پردازش شده را ارائه می دهند ، ارزیابی برای پزشکان ساده است. پزشکان فقط باید شرایط اندازه گیری مانند تنظیم دقیق سیستم را قبل از اندازه گیری مشاهده کنند. آنها همچنین باید به حداکثر دقت معتبر سیستم ها احترام بگذارند.
ارزیابی موقعیت سر و شانه ها
از نظر ریاضی یک مشکل ساده برای تعیین تمایل ، چرخش و خم شدن/گسترش سر از عکس ها و سنسور Gyro-achelerometer است. مقادیر زاویه اندازه گیری و به طور خودکار به سیستم مختصات فیزیکی تبدیل می شوند. فرآیند اندازه گیری معمولاً طبق یک روش از پیش تعریف شده که باید دنبال شود انجام می شود ، شکل 7 را ببینید. این فرآیند بر اساس دو مرحله اصلی/بخش الگوریتم محاسباتی و محاسباتی انجام می شود. قسمت اول الگوریتم برای تنظیم دقیق سیستم طراحی شده است. بخش دوم برای اندازه گیری بخش های بدن بیمار و محاسبه زوایا در سیستم مختصات فیزیکی در نظر گرفته شده است.
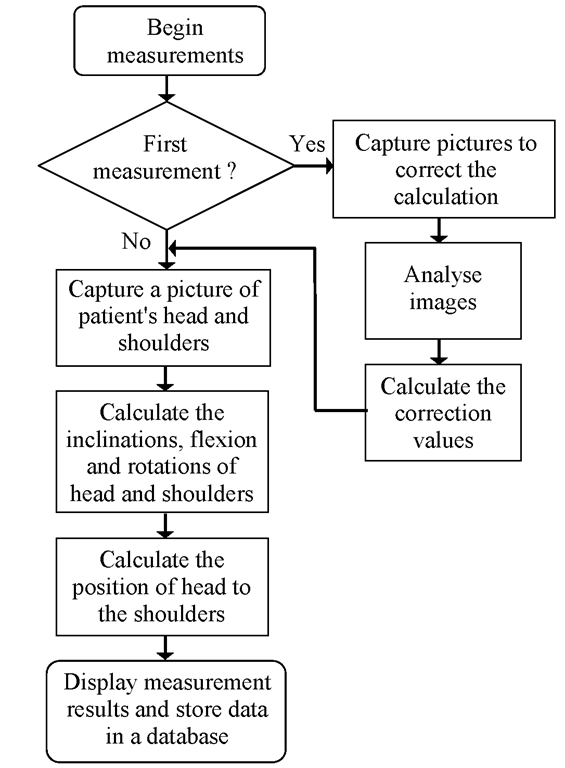
شکل 7. نمودار نمودار اندازه گیری های بالینی با استفاده از سیستم دوربین طراحی شده.
سیستم های توصیف شده اطلاعات مستقیمی را برای پزشکان در مورد موقعیت فعلی سر و شانه های بیمار که توسط زاویه ها نشان داده شده است ، ارائه می دهند. هیچ پردازش اطلاعات دیگری وجود ندارد و پزشک ممکن است از داده ها برای ارزیابی سلامت بیمار استفاده کند. سیستم های طراحی شده موقعیت سر را با دقت 0/0 درجه (هوزمن و همکاران ، 2008) در سه هواپیما (چرخ ش-yaw ، خم شدن-پچ و شیب) اندازه گیری می کنند. اندازه گیری تجربی ما از موقعیت سر با اندازه گیری درک ذهنی عمودی (SPV) به پایان رسید. موضوع سعی کرد هنگام نگاه کردن به کره سفید ، سوزن را به موقعیت عمودی تراز کند. زاویه نهایی سوزن اندازه گیری شد. داده های اندازه گیری شده نشان می دهد که موضوع سالم سر خود را با سیستم مختصات فیزیکی در محدوده 5 درجه پوند برای تمایل قرار می دهد. مجموعه داده ها برای داوطلبان استخدام شده اندازه گیری شد. نتایج همچنین پیش بینی می کند که بین مقادیر تمایل و SPV ارتباطی وجود دارد.
تجزیه و تحلیل حرکت چشم و سر
هدف از روشهای جدید طراحی شده ما استفاده از تشخیص حرکات چشم به همراه صحنه تحریک است. به لطف نمایشگرهای ویژه طرح ریزی HMD 3D ، ما از الگوریتم Starburst برای اندازه گیری در طیف IR و دیود LED مناسب برای روشنایی چشم استفاده کردیم (Charfreitag و همکاران ، 2008). هدف از اندازه گیری حرکات چشم ، یافتن مرکز منطقه دانش آموز بود (Stampe ، 1993). ما از یک سیستم جدید مبتنی بر یافتن خط کانتور دانش آموز چشم استفاده کردیم. سرانجام ، در پایان ، می توانیم مرکز دانش آموز را از بیضی حاصل در سیستم مختصات دوربین یعنی عکس ها پیدا کنیم ، شکل 8 را ببینید.
بخش دوم استفاده از HeadTracker برای اندازه گیری موقعیت سر بود. مقادیر اندازه گیری اول به عنوان اولیه ، یعنی صفر مورد استفاده قرار گرفت و به عنوان تصحیح برای تمام مقادیر بعدی استفاده شد. سیستم های جدید اطلاعات مستقیمی را برای پزشکان در مورد موقعیت فعلی مرکز دانش آموزان ارائه شده توسط پیکسل ها یا میلی متر و سر بیمار که توسط سه زاویه نشان داده شده است ، ارائه می دهد ، شکل 9 را ببینید. وادموقعیت سر با استفاده از HMD 3D اصلاح شده (Z800 3dvisor) با دقت 1. 0 درجه در سه هواپیما اندازه گیری شد (Charfreitag و همکاران ، 2009). بنابراین ، ما می توانیم حرکت سه بعدی سر را که توسط سه زاویه تعریف شده است - تمایل ، چرخش و خم شدن/پسوند مطالعه کنیم. با این روش همچنین می توانیم حرکات چشم و سر را بطور مداوم و همزمان مطالعه ، تجزیه و تحلیل و اندازه گیری کنیم.
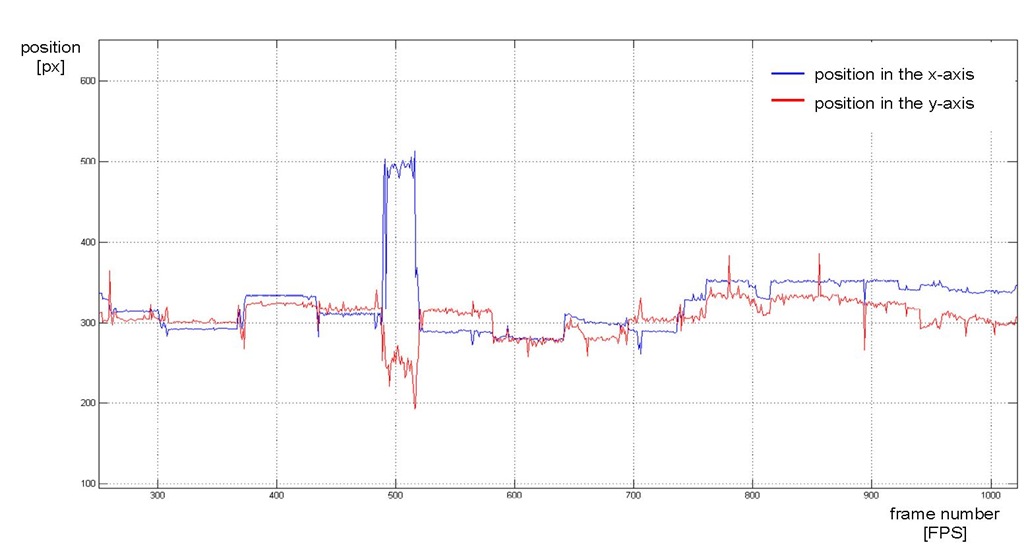
شکل 8. مثال نمودار حرکات مرکز دانش آموزان
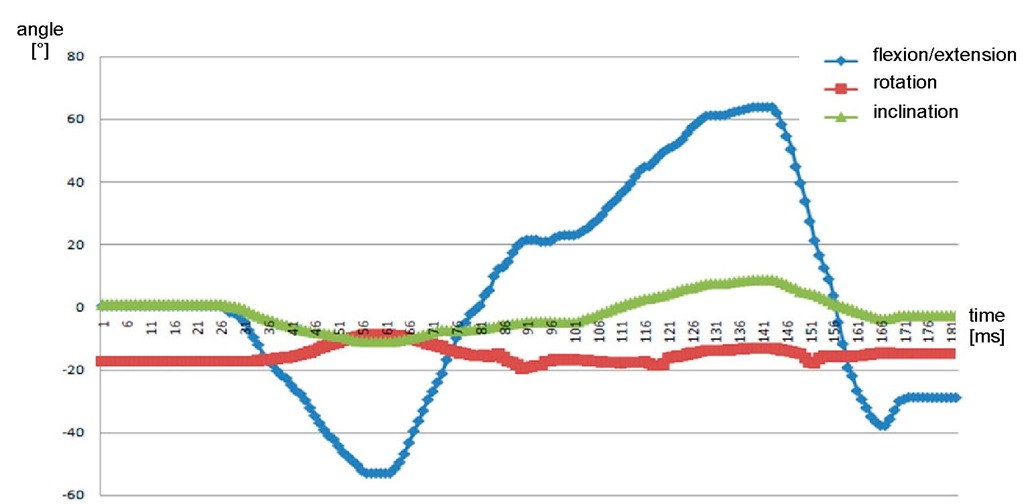
شکل 9. نمونه نمودار حرکات سر
نتیجه
در این موضوع آثار مرتبط را شرح داده ایم و تجهیزات ویژه و روشهای اندازه گیری را برای ارزیابی بسیار دقیق موقعیت چشم ، سر و شانه در عمل عصبی طراحی کرده ایم. برنامه های کاربردی و دیدگاه های احتمالی برای عمل بالینی نیز در موضوع شرح داده شده است.
ما سیستم ها و مجموعه ای از روش ها را برای ارزیابی تمایل ، خم شدن و چرخش سر و تمایل و چرخش شانه ها با وضوح و دقت به 2 درجه توصیف کرده ایم. این دقت حداقل دقت مورد نیاز در عمل بالینی است. روشهای توصیف شده برای اندازه گیری و ارزیابی موقعیت های چشم ، سر و شانه نیز می تواند در سایر زمینه های پزشکی و علوم اعمال شود.
سیستم های طراحی شده ما مبتنی بر دوربین یا احتمالاً بر روی سنسورهای Gyro-quelerometer (اینرسی) است. دو یا سه تجهیزات دوربین جدید که برای اندازه گیری موقعیت های سر و شانه ها طراحی شده اند ارزان تر و دقیق تر از سیستم های پیشرفته است که از شتاب سنج و مغناطیس استفاده می کنند. دومین مزیت سیستم دوربین ما نسبت به سیستم های معمولی و تجاری مانند سیستم تجزیه و تحلیل حرکت گورخر (Zebris Medical GMBH) ، Lukotronic AS100/AS200 (Lukotronic Lutz-Kovacs-Electronics Oeg.) یا Sonosens Monitor (Sensomotion ، Inc.) این استمی تواند بیمار را بدون تأثیر عناصر مکانیکی در بخش های بدن بیمار اندازه گیری کند یا اینکه این سیستم امکان تشخیص مستقیم محورهای آناتومیکی سر و شانه های بیمار را فراهم می کند ، که در هنگام استفاده از سیستم های فعلی نمی توان انجام داد (هوزمن و همکاران ، 2005). سیستم های مبتنی بر دو دوربین دارای دوربین در هر دو طرف (پروفایل های جانبی) یا در جلو و بالاتر از بیمار هستند. این یک مزیت بسیار مهم برای پزشکان پزشکی است ، زیرا آنها می توانند معاینات مختلفی را انجام دهند که به فضای باز در مقابل صورت نیاز دارند. سیستم های ما مبتنی بر ترکیب دوربین های مادون قرمز و سیستم های اینرسی نیز برای استفاده گسترده تر از سیستم های تجاری کافی و دقیق تر و ارزان تر از سیستم های تجاری هستند تا فقط برای تجزیه و تحلیل موقعیت سر و شانه ها.
نتایج اندازه گیری میانگین مقادیر موقعیت سر (100 کنترل سالم): خم شدن یکپارچهسازی با سیستمعامل 21. 7 درجه ؛تمایل به سمت راست 0. 2 درجه ؛چرخش سر به سمت چپ 1. 7 درجه. اندازه گیری چرخش در مقایسه با اندازه گیری تمایل و خم شدن/پسوند خطای بیشتری دارد (Kutilek & Hozman ، 2009).
ما همچنین سیستم های مرتبط و سیستم طراحی شده را برای نظارت بر حرکات چشم شرح داده ایم. تجهیزات ما که برای اندازه گیری حرکات چشم و سر طراحی شده اند بر اساس واحدهای نمایشگر - عینک های تخصصی با Emagin 3dvisor ساخته شده است. ما نمایشگرهای پیش بینی تخصصی را برای معاینه عصبی اصلاح کردیم که می توانند با استفاده از یک مجموعه متغیر از محرکهای بصری و حرکات سر فعال اندازه گیری ها را انجام دهند. محلول برای اندازه گیری حرکات چشم و وضعیت سر در فضای سه بعدی با تحریک چشم 2D یا 3D ترکیب می کند. ما به این نتیجه رسیدیم که می توان دو روش مهم و نزدیک مرتبط را برای اندازه گیری سیستم وستیبولار انسانی به هم پیوست.
نتیجه این مطالعه توصیه ای برای استفاده از دوربین های فیلمبرداری با فرکانس بالاتر (تقریباً 200 هرتز) برای اندازه گیری حرکات چشم و ردیاب سر با خطای پویا پایین تر (کمتر از 0. 3 درجه بر ثانیه) برای اندازه گیری موقعیت سر است. دقت کلی سیستم طراحی شده ما می تواند به میزان قابل توجهی افزایش یابد زیرا دقت این روش به تنهایی در هشت درجه در هر ده اندازه گیری است. این خطای پویا به دلیل ردیاب کم هزینه است که پس از اندازه گیری قبلی به مدت طولانی برای تثبیت نیاز دارد.
روشهای فوق و طراحی شده برای اندازه گیری موقعیت و حرکت چشم ، سر و شانه نیز می تواند در سایر زمینه های مهندسی ، پزشکی و علوم اعمال شود. از سیستم های ما می توان در هر جایی برای مطالعه وضعیت یک شخص استفاده کرد.
نرم افزار مفید تریدر...
ما را در سایت نرم افزار مفید تریدر دنبال می کنید
برچسب :
نویسنده : احمد شاملو
بازدید : 43
